Jobs@Gefasoft
Bereit für Neues? Starte deine Karriere in einem Unternehmen, das auf die Entwicklung, Herstellung und den Vertrieb hochmoderner Automatisierungssysteme spezialisiert ist. BE PART OF OUR VISION!
WE AUTOMATE LIGHT – CAMERAS, LASERS & ROBOTICS
Mit über 25 Jahren Erfahrung setzen wir Kerntechnologien im Bereich der Bildverarbeitung, Lasertechnologien und PressFit ein, um bahnbrechende Lösungen für unsere Kunden zu schaffen. Unsere Mitarbeiter:innen sind das Herzstück unseres Erfolgs. Ihr Talent, ihre Leidenschaft und ihr Engagement sind der Motor für unsere Innovationen und unser Wachstum. Mit unserer Expertise und unserem Teamspirit sind wir bereit, die Herausforderungen der Zukunft anzunehmen und unseren Kunden zum Erfolg zu führen.
Du bist auf der Suche nach einem Arbeitsplatz, bei dem Du von Anfang an Deinen Fingerabdruck hinterlassen kannst? Selbstverantwortung, Freiheit und Weiterentwicklung sind Dir wichtig? Egal ob Schüler:in, Studierende:r oder Direkteinsteiger:in – das sind Deine Einstiegsmöglichkeiten bei GEFASOFT mit persönlicher Wachstumsgarantie.
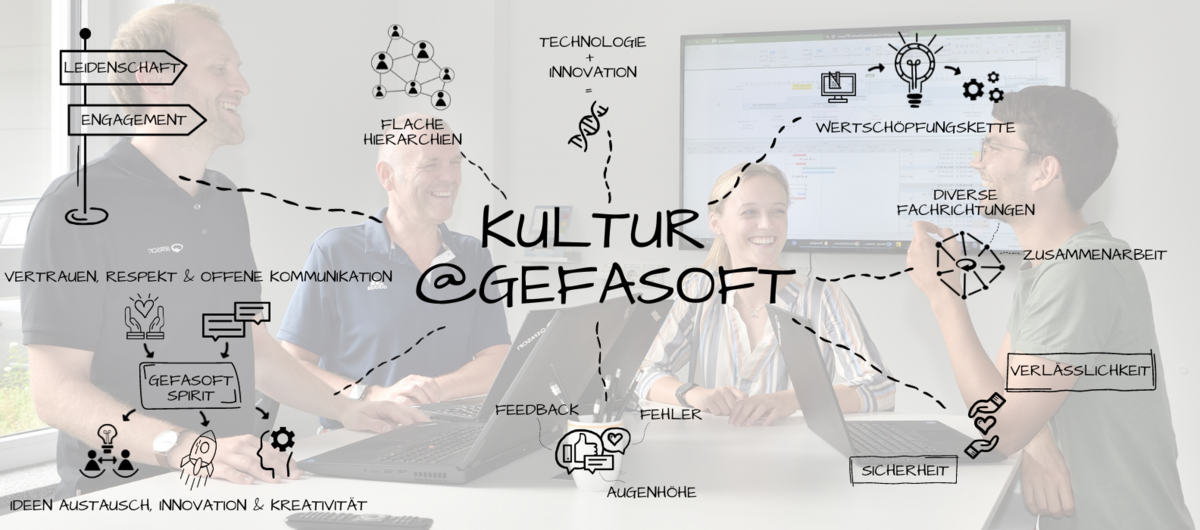
Wir@Gefasoft
Das macht uns aus
Wir sind Visionär:innen, Macher:innen, Problemlöser:innen, Entwickler:innen, Serviceprovider:innen und Teamplayer:innen.
Technologie und Innovation sind Teil unserer DNA. Sie stecken in allem, was wir tun. Die Stärken unseres Teams liegen dabei in der schnellen und versierten Umsetzung neuster Technologien. Gemeinsam mit unseren Kunden definieren wir in unseren Applikationslaboren neue Prozesse und setzen diese in kundenspezifische, validierte Automatisierungslösungen um. Wir sind führender Technologiepartner für Bildverarbeitungs- und Lasersysteme und glauben an die Kraft der Innovation.
Wir verbinden Kompetenzen entlang der gesamten Wertschöpfungskette – vom CAD-Programm bis in die Werkstatt. Unsere Fertigungsanlagen werden in Regensburg und Nittendorf von Grund auf konzipiert, gebaut und schließlich in Betrieb genommen. Zielgerichtet und kundenspezifisch. Alles aus einer Hand.
Als inhabergeführtes mittelständisches Unternehmen steht bei uns Verlässlichkeit und Sicherheit für unsere Mitarbeiter:innen in allen Belangen an erster Stelle. Wir übernehmen soziale und gesellschaftliche Verantwortung und blicken bei unserem Handeln stets über den Tellerrand hinaus. In den vergangenen 25 Jahren sind wir gesund und kalkulierbar gewachsen. Flache Hierarchien sind für uns genauso selbstverständlich wie einer positiven Fehler- und Feedbackkultur. Neben unserem urbanen Hauptsitz am Tech-Campus in Regensburg und unserer Betriebsstätte in Nittendorf zählen die Niederlassung in Mexiko und in Ungarn, sowie die Servicestützpunkte in Malaysia, Brasilien und China zur GEFASOFT Group.
Alle Leistungen beim Erstellen unserer Systeme – von der Konzeptionierung und Planung über den Aufbau, die Inbetriebnahme und Tests bis zur Installation beim Kunden – werden durch unsere Mitarbeiter:innen in interdisziplinären Teams durchgeführt. Unsere Mitarbeiter:innen sind Ingenieur:innen und Techniker:innen aller Fachrichtungen, Mechatroniker:innen, Zerspanungsmechaniker:innen, Mathematiker:innen, Physiker:innen, Elektriker:innen und sowie Betriebswirt:innen. Unterstützt werden sie dabei von zahlreichen Werkstudent:innen, Auszubildenden und Praktikanten:innen, die ebenfalls fest in unsere Teams integriert sind.
So unterschiedlich unsere Mitarbeiter:innen auch sind – alle zusammen arbeiten täglich mit Leidenschaft und Engagement an dem gleichen Ziel: wir denken Automatisierungsprozesse für die Industrie von Morgen neu.
Im Herzen unseres Unternehmens steht ein unschätzbarer Wert: Unser GEFASOFT-Spirit. Bei uns geht es nicht nur darum, Aufgaben zu erledigen. Jede:r Einzelne im Team spielt eine wichtige Rolle und trägt zum Erfolg des Unternehmens bei. Durch offene Kommunikation, Vertrauen und Respekt schaffen wir eine positive Arbeitsumgebung, in der Ideen ausgetauscht, Innovation gefördert und Kreativität entfaltet werden.
Inside GEFASOFT
"Bei GEFASOFT kann ich mich in ein breites Spektrum an interessanten und verantwortungsvollen Aufgaben einbringen. Sie bietet mir und meinen Kolleg:innen einen modernen und angenehmen Arbeitsplatz. Gemeinsam erarbeiten wir innovative Hightech Lösungen für unsere Kunden weltweit. Der respektvolle und wertschätzende Umgang der Mitarbeiter:innen und Vorgesetzen untereinander motiviert uns alle, unser Bestes zu geben.
My tip for you, join the team!"

"GEFASOFT hat mich bereits als Werkstudent vor meiner Festanstellung mit Ihrem familiären Arbeitsumfeld begeistert. Egal ob es um fachliche Fragen oder einfach um ein freundliches Gespräch zwischen Kolleg:innen geht – die offene Kommunikation und der persönliche Kontakt sind bei uns selbstverständlich, schaffen eine positive Atmosphäre und fördern das Miteinander. Hier wird neben eigenverantwortlichem Handeln auch eine stetige Weiterentwicklung der Mitarbeiter:innen großgeschrieben."
"Vor 22 Jahren habe ich hier angefangen und bin quasi mit der GEFASOFT „auf“gewachsen. Die Firma liegt mir sehr am Herzen, weil ich das Gefühl bekomme, hier gebraucht zu werden!
Im Sondermaschinenbau gibt es immer wieder neue Herausforderungen, die meine Arbeit abwechslungsreich und spannend machen."

"Ich bin ein Mensch, der Abwechslung braucht. Ich mag es zu organisieren, Verantwortung zu übernehmen und körperlich zu arbeiten. Das alles habe ich hier bei GEFASOFT. Mir wird von der Geschäftsleitung und von den Mitarbeiter:innen das Gefühl gegeben, dass ich gebraucht werde."

"Mein Arbeitsalltag bei GEFASOFT ist breit gefächert. Von der Idee über die Planung bis hin zur Umsetzung der technischen Lösungen. Ich stehe mit allen Abteilungen im Austausch. Die Freiheit bei der konstruktiven Umsetzung von Aufgaben ist sehr groß - aber auch die Verantwortung und das Vertrauen, die getroffene Entscheidung umzusetzen und zu Ende zu führen. Eine GESUNDE Mischung aus Stress und Hektik gehört dazu. Weder Privatleben noch Beruf können für sich alleine die Herausforderungen und Erlebnisse bieten.
Die Mischung macht’s!"

"Ich arbeite gerne bei der GEFASOFT, weil ich hier ein angenehmes Umfeld habe, gut ausgebildet werde und von meinen Kolleg:innen sehr wertgeschätzt werde."
"Durch die verschiedenen Themengebiete und Aufgabenstellungen bei uns in der Bildverarbeitung wird es nie langweilig. Ich habe mich von Anfang an bei GEFASOFT wohl gefühlt und schätze das sehr gute Verhältnis zwischen den Kolleg:innen. Es ist schön, dass fast kein Tag vergeht, wo nicht irgendwelche Kolleg:innen nach der Arbeit noch auf der Dachterrasse oder im Sozialraum zusammensitzen. Meiner Meinung nach einer der besten Arbeitgeber über die Grenzen Regensburgs hinaus!"

"Als Werkstudentin bei GEFASOFT gefällt mir besonders die Flexibilität, von überall aus arbeiten zu können, sodass sich Studium und Werkstudententätigkeit gut miteinander vereinbaren lassen. Von Minute eins an habe ich mich hier wohl gefühlt und wurde gut in das Team integriert. Zudem habe ich die Chance, neben dem Studium erste Praxiserfahrungen zu sammeln, wobei mir GEFASOFT mit einer Bandbreite an vielfältigen Aufgabenbereichen verschiedenste Perspektiven ermöglicht."

„Ich schätze die vielfältigen Entwicklungsmöglichkeiten bei GEFASOFT sehr. Sie ermöglichen es mir, mein volles Potenzial auszuschöpfen und meine beruflichen Ziele zu erreichen.“
Nachhaltigkeit@Gefasoft
Unser Beitrag für eine klimafreundliche Zukunft

Wir setzen aktiv Maßnahmen zur Förderung einer klimafreundlichen Zukunft um.
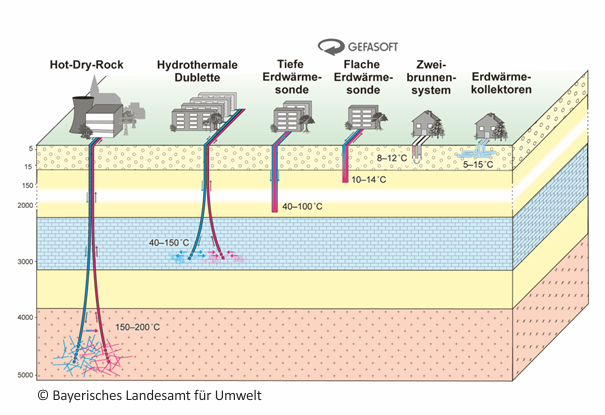
70 Meter tief sind unsere 44 geothermischen Bohrungen. Sie ermöglichen es uns, das Gebäude CO2 freundlich zu heizen und zu kühlen. Dadurch können wir nahezu vollständig auf Gas-Zusatzheizungen verzichten und reduzieren somit unsere CO2-Emissionen erheblich – und ganz nebenbei haben wir dadurch ein angenehmes Raumklima für unsere Mitarbeiter:innen. In Ergänzung prüfen wir derzeit die Installation einer Photovoltaikanlage auf dem Dach unserer Fertigungshalle.

Unsere Mitarbeiter:innen unterstützen wir in ihrem Bestreben, klimafreundlich zu handeln. Indem wir ihnen verschiedene Möglichkeiten bieten, einen nachhaltigen Arbeitsweg zu wählen. Bei uns haben unsere Mitarbeiter:innen beispielsweise die Möglichkeit ein Dienstfahrrad zu erhalten. Des Weiteren haben wir E-Ladesäulen eingerichtet, um die Nutzung von Elektrofahrzeugen zu erleichtern.
Darüber hinaus bieten wir unseren Mitarbeiter:innen das RVV Job-Ticket plus, um die Nutzung des öffentlichen Nahverkehrs zu fördern. Damit möchten wir einen Anreiz schaffen, den eigenen PKW öfter stehen zu lassen und stattdessen umweltfreundlichere Transportmittel zu nutzen. Zusätzlich unterstützen wir unsere Mitarbeiter:innen mit dem Deutschland-Ticket-Job, um auch überregional nachhaltige Mobilität zu ermöglichen.
Darüber hinaus entwickeln wir Technologien, die eine deutliche Energieeinsparung in der Produktion pro Bauteil bzw. Stück ermöglichen. Mehr dazu findest Du in Kürze unter News. Die Förderung der Nachhaltigkeit liegt uns am Herzen. Wir werden auch weiterhin bestrebt sein, innovative Lösungen zu finden und unsere Bemühungen um Nachhaltigkeit kontinuierlich verbessern.
Benefits@Gefasoft
So individuell wie Du sind auch unsere Benefits
(*ab Betriebszugehörigkeit 2 Jahre)
(*ab einer Betriebszugehörigkeit von einem Jahr)